Por Herman Castañeda y Alejandro González
Los vehículos acuáticos de superficie no tripulados, o USV por las siglas en inglés de unmanned surface vehicles, son embarcaciones que operan con sistemas robotizados y sensores que perciben su posición y su alrededor, con actuadores que les permiten desplazarse y una unidad de procesamiento que administra los datos para ejecutar una tarea determinada.
Asimismo, cuentan con un controlador cuyo objetivo es garantizar que el bote siga una trayectoria deseada, considerando restricciones de tiempo y espacio. Sin embargo, en la práctica, existen incertidumbres, dinámicas no modeladas y perturbaciones, como se muestra en la Figura 1, que afectan la estabilidad o, en su defecto, reducen el desempeño del sistema.
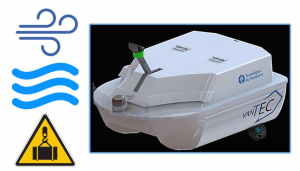
Las incertidumbres paramétricas corresponden a variación de las propiedades físicas, tales como la masa o la inercia. En cambio, las dinámicas no modeladas son todas aquellas dinámicas que influyen en el sistema y son omitidas, aspecto que ocurre con regularidad en el diseño de control. Finalmente, las perturbaciones externas son condiciones que no pertenecen al sistema y que afectan al vehículo, como son el viento, las olas, las corrientes acuáticas, la presión atmosférica, entre otros factores.
En este sentido, estos vehículos acuáticos requieren controladores de alto desempeño que puedan tratar con esta clase de perturbaciones. En la literatura, existen técnicas que tratan estos problemas. No obstante, normalmente se requiere el conocimiento exacto de los disturbios para compensar tal efecto y garantizar el funcionamiento correcto del controlador. Comúnmente, este conocimiento preciso no está disponible, o bien es complicado de estimar, aumentando la dificultad de los sistemas de control. Así, el estudio de controladores robustos permite abordar problemas cada vez más complejos y con alto grado de incertidumbre.
Controladores de alto desempeño
Este trabajo de investigación consiste en el diseño de controladores robustos. Nuestras propuestas se basan en las técnicas de control por modos deslizantes, que tienen propiedades de robustez sobresalientes con respecto a otras técnicas de control. Sin embargo, tienen una desventaja llamada “chattering”, que es una oscilación de alta frecuencia en el control que puede dañar parcial o totalmente los actuadores del vehículo, es decir, los propulsores. La fuente de este problema son las incertidumbres y las ganancias sobredimensionadas de los controladores.
Entonces, una manera de reducir el “chattering” es estimando y compensando dichas perturbaciones, esto requiere un gran esfuerzo y no siempre se pueden obtener dada la aleatoriedad intrínseca de tales perturbaciones. Por tanto, se proponen controladores adaptativos que varían la ganancia de control en función del requerimiento. En otras palabras, si hay perturbación, la ganancia de control crece para rechazarla y, por el contrario, la ganancia decrece a un mínimo de operación.
Nuestra propuesta
Mediante el diseño de controladores robustos podremos garantizar que la trayectoria de los botes sea satisfecha en presencia de tales disturbios. Nuestra investigación comienza en [1], donde a partir de las leyes físicas se deriva el modelado matemático del USV, se estiman parámetros hidrodinámicos y se valida el modelo del bote experimentalmente. Seguido de [2], en el que se presenta un controlador por modos deslizantes adaptativos en presencia de incertidumbres, en este caso con una carga extra que hace variar sus parámetros, especialmente la masa y la inercia.
Los resultados de esta investigación demostraron un gran desempeño del controlador y se compararon con propuestas recientes, tal como se puede ver en este video:
En [3], se propone extender el control y una ley de guiado, ambas robustas y con un desempeño superior puesto que se atienden criterios de desempeño como lo es el tiempo de convergencia, permitiendo satisfacer requisitos como tiempo para ejecutar tareas o circuitos pertinentes a los barcos.
La evolución de la investigación fue poder parametrizar las perturbaciones, por tal motivo se presentó en [4] una propuesta que usa explícitamente modelos ambientales realistas, obteniendo resultados preliminares en simulación. Más recientemente, en [5] y [6], se proponen controladores más avanzados que, además de ser robustos y garantizar el seguimiento de las trayectorias, se puede establecer el tiempo máximo para que el bote consiga establecerse en la trayectoria.
Resultados experimentales demostraron las características de nuestras propuestas, como se puede observar a continuación:
Por último, el prototipo (ver Figura 2) donde se implementaron los controladores fue desarrollado por el grupo estudiantil VantTec, del Tecnológico de Monterrey. Tal vehículo es de tipo catamarán, hecho con fibra de vidrio, de 1 metro de longitud y 30 kg de peso. Cuenta con un sistema de sensores como la unidad de medición inercial y GPS para obtener su posición y orientación, 2 propulsores eléctricos de 36.5N que proporcionan el empuje y finalmente una unidad de procesamiento que procesa la información proveniente de los sensores, computar el controlador y comandar las tareas.

Las aplicaciones
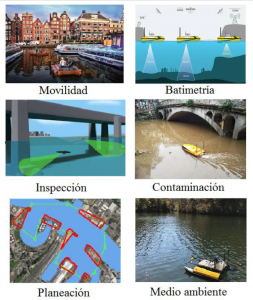
Debido a estos controladores robustos, las trayectorias, ya sea constantes o variables, son garantizadas en presencia de incertidumbres y perturbaciones. Entre las aplicaciones se encuentran: batimetría, inspección de puentes, costas y manglares, así como el monitoreo ambiental de niveles de contaminación de presas, lagos, estanques, canales, e incluso ríos y arroyos. Además, se pudieran desarrollar botes autónomos para el transporte de personas, ya sea en canales o ríos (como por ejemplo en Amsterdam, Venecia o el mismo paseo Santa Lucia en Monterrey, México) donde la incertidumbre es grande dado que suben pasajeros de diferente peso y cantidad, beneficiándose especialmente de este tipo de controladores.
Cabe mencionar que actualmente se trabaja en colaboración con el proyecto Roboat. Este es un proyecto de movilidad con botes autónomos entre el Instituto para Soluciones Metropolitanas Avanzadas (AMS) de Amsterdam y el Instituto Tecnológico de Massachussets (MIT), donde Alejandro González García, estudiante de la Maestría en Ciencias de la Ingeniería del Tecnológico de Monterrey, está realizando una estancia de investigación contribuyendo en dicho proyecto.
Autores
Dr. Herman Castañeda es profesor investigador del Grupo de Investigación y de Enfoque Estratégico en Robótica del Tecnológico de Monterrey. Sus intereses de investigación incluyen el diseño, modelado matemático y control de vehículos autónomos aéreos, acuáticos y terrestres, y las aplicaciones de teoría de control y observadores no lineales en la robótica. [email protected]
Alejandro González García es estudiante de la Maestría en Ciencias de la Ingeniería (MCI) del Tecnológico de Monterrey, especializándose en Robótica y control. Sus intereses de investigación incluyen modelación matemática, control y evasión de obstáculos para vehículos autónomos acuáticos y aéreos. [email protected]
Bibliografía de referencia
- Modeling, identification and control of an Unmanned Surface Vehicle, A Gonzalez-Garcia, H Castañeda, AUSVI XPONENTIAL, 2019
- Guidance and Control Based on Adaptive Sliding Mode Strategy for a USV Subject to Uncertainties, A Gonzalez-Garcia, H Castañeda IEEE Journal of Oceanic Engineering, 2021, Vol. 46, No. 4, pp. 1144-1154, 2021, DOI:10.1109/JOE.2021.3059210
- Finite-Time Control for an Unmanned Surface Vehicle Based on Adaptive Sliding Mode Strategy, Jonathan Rodriguez, Herman Castañeda, Alejandro Gonzalez-Garcia, J L Gordillo, Submitted to Ocean Engineering, 2021.
- Adaptive integral sliding mode control, A Gonzalez-Garcia, H Castañeda, 13 th IFAC Conference on Control Applications, Marine Systems, Robotics and Vehicles, September 22-24, 2021
- Prescribed Finite-Time Unmanned Surface Vehicle via Adaptive Integral Terminal Sliding Mode Under Perturbations, A Gonzalez-Garcia, H Castañeda, Hesheng Wang, Submitted to IEEE Transactions on Control Systems and Technology
- Adaptive integral terminal super-twisting with predefined convergence for an unmanned surface vehicle under disturbances, A Gonzalez-Garcia, H Castañeda, Submitted to International Journal of Robust and Nonlinear Control