
Por Luis Eduardo Garza Castañón
Los vehículos submarinos autónomos (AUVs, por sus siglas en inglés) son robots que realizan diversas tareas como exploración, búsqueda, operaciones de inteligencia y reconocimiento, monitoreo de contaminantes, supervisión de infraestructuras, manipulación de equipos, investigación y desarrollo marítimo. Los principales componentes de estos vehículos son el casco, los sistemas de control y comunicaciones, los sensores, la fuente de energía, y el sistema de propulsión. Los sistemas de propulsión permiten el movimiento en el medio acuático y los más utilizados se basan en hélices impulsadas por motores. Sin embargo, los investigadores han descubierto que dichas hélices son fuente importante de contaminación de los ambientes subacuáticos, aumentan la mortalidad de las criaturas marinas y alteran los ecosistemas, por lo que la comunidad científica se encuentra en la búsqueda de métodos alternativos de propulsión con mayor eficiencia y menor impacto en el ambiente.
Desplazamiento de los peces en el agua
La naturaleza a través de muchos años de evolución ha perfeccionado las habilidades de supervivencia de todas las especies. Es así como algunos peces desarrollan una gran velocidad para trasladarse, alimentarse o escapar de sus depredadores. Por ejemplo, el atún y el delfín son dos de los peces que pueden nadar más rápido en el mar. Ambos pueden alcanzar en tramos cortos velocidades superiores a 60 km/h. Ellos utilizan como fuente principal de impulso el movimiento rítmico de una aleta ubicada en la parte posterior del cuerpo llamada aleta caudal. Sin embargo, la orientación de esta aleta es diferente en ambos peces, ya que en el atún su posición es vertical y en el delfín es horizontal. Esto tiene un efecto importante en la fuerza de empuje y la orientación del cuerpo del pez. La forma de la aleta, los músculos conectados a la aleta y un cuerpo con perfil de baja fricción complementan este sistema de propulsión natural.
Ingeniería biomimética
¿Cómo podemos aprender de la forma como se impulsan los peces para desarrollar sistemas de propulsión más amigables con el ambiente marino? La respuesta está en la biomimética, una ciencia que toma ejemplos de las creaciones naturales para aplicarlas en el desarrollo de tecnologías más eficientes y amigables con el entorno.
En épocas recientes se han empezado a desarrollar un tipo de vehículos submarinos autónomos biomiméticos (BAUVs, por sus siglas en inglés) que viajan con propulsión ondulatoria, tratando de imitar el nado de peces como el atún. Este movimiento crea una diferencia de presión en el agua al mover una parte de su cuerpo en un patrón ondulado. Para generar esa oscilación se pueden emplear diferentes tipos de mecanismos. La mayoría de ellos utilizan uno o más motores, trasmisiones mecánicas con cierta configuración y materiales inteligentes. Sin embargo, estos diseños presentan varias deficiencias como la generación de ruido, mayor consumo de energía y un empuje de propulsión vectorial unidireccional (es decir el avance se realiza solamente en un eje). El más rápido de estos diseños alcanza velocidades de hasta 10 BL/s (siglas en inglés de longitud corporal por segundo).
Investigación de vanguardia
En el grupo de enfoque en Robótica del Tecnológico de Monterrey, investigadores y alumnos de posgrado desarrollan un novedoso sistema de propulsión para submarinos, que se basa en un mecanismo paralelo de 3 ejes. Está compuesto de 2 plataformas, una fija y una móvil (ver Figura 1). Estas plataformas se conectan por 3 motores de desplazamiento lineal distribuidos de manera casi equidistante. En la plataforma móvil se conecta una aleta caudal impresa en 3D. Para lograr el movimiento que imita el modo de nado de los peces, primero se posiciona la aleta en modo vertical o horizontal (modo atún o delfín) y enseguida se configura el movimiento cíclico de los motores. Aún más interesante, el ángulo de posición de la aleta se puede ajustar, permitiendo posiciones intermedias entre la horizontal y la vertical, para tener una propulsión que no existe en la naturaleza.
La frecuencia de oscilación de la aleta determina la velocidad de avance en el eje longitudinal, pero también contribuye al desplazamiento en los otros dos ejes, además de generar rotaciones menores alrededor de los 3 ejes coordenados. Esto obliga a considerar el diseño de una estrategia novedosa para controlar la navegación del vehículo de una manera precisa. Las ventajas de este mecanismo con relación a los tradicionales son, por un lado, la posibilidad de alcanzar grandes velocidades al incrementar la frecuencia de oscilación y, por el otro, la generación de un vector de empuje variable que permite mayor maniobrabilidad. Adicionalmente, el movimiento de los actuadores lineales genera menos ruido que los motores con hélice.

Los avances en el nuevo vehículo
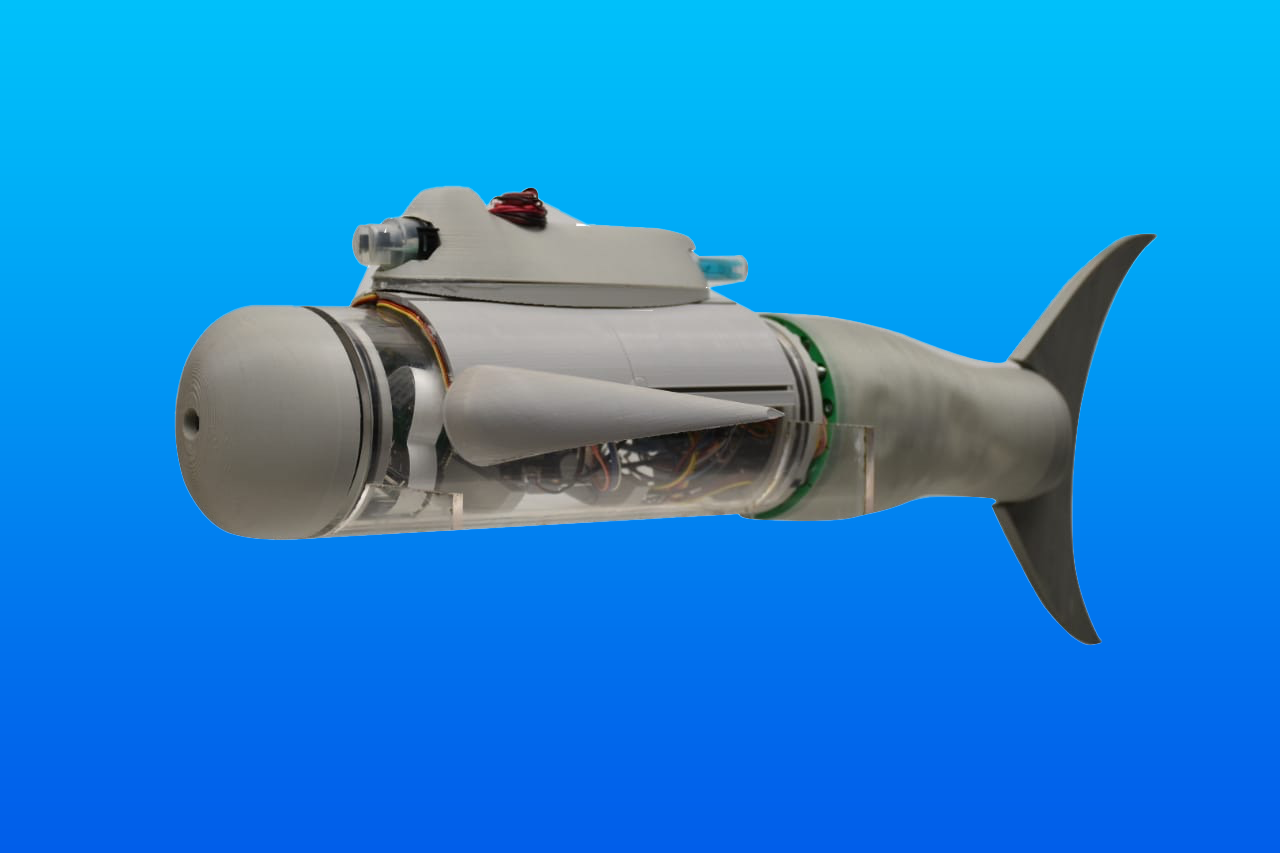
El equipo de alumnos y profesores ha realizado avances significativos en este proyecto. Primero, se ha desarrollado un prototipo físico (ver Figura 2) que comprende la integración de los principales componentes: Casco, mecanismo de propulsión y aletas pectorales, sistema electrónico de control y comunicaciones, sensores de calidad del agua (turbidez y PH) y cámara de video. En los próximos meses se tienen programadas las pruebas de integración de los subsistemas, las pruebas en seco y finalmente las pruebas en el agua.
El segundo avance que se ha hecho consiste en el desarrollo de los modelos matemáticos del sistema de propulsión, tomando como base el estudio de las fuerzas generadas por el mecanismo paralelo de 3 ejes. Al mismo tiempo, se han estudiado los efectos de esas fuerzas generadas sobre el movimiento del vehículo en el agua, considerando los principios de hidrodinámica. Asimismo, una primera etapa del sistema de control ha sido probada en modo simulación para comprobar el posicionamiento adecuado de los actuadores lineales.
Actualmente se diseña el sistema automático de control en lazo cerrado, que va a permitir direccionar el vehículo a posiciones deseadas bajo el agua. Esto representa una innovación importante, ya que hasta la fecha los vehículos desarrollados por la comunidad científica en todo el mundo solamente pueden desplazarse en modo manual, es decir con una persona controlando cada movimiento.
El futuro
El despliegue de submarinos diseñados con un enfoque más amigable al medio ambiente va a permitir la realización de múltiples actividades en el entorno marino, sin el impacto negativo que se tiene en la actualidad con los vehículos submarinos tradicionales. El submarino biomimético diseñado en el Tecnológico de Monterrey se va a aplicar en principio al monitoreo de contaminantes disueltos en el agua. Esto va a permitir la construcción de mapas tridimensionales dinámicos precisos, que permitan estudiar a fondo el problema, detectar las posibles fuentes de contaminación y generar soluciones apropiadas para mitigar el problema.
El autor
Dr. Luis E. Garza Castañón es profesor-investigador asociado del departamento de Mecatrónica y Eléctrica de la zona Monterrey e investigador nivel 1 del Sistema Nacional de Investigadores. Es miembro del Grupo de Enfoque en Robótica. Sus áreas de interés se relacionan a vehículos autónomos aéreos y marinos, supervisión y control avanzado de procesos, sensores e instrumentos, sistemas embebidos y aplicación de técnicas de inteligencia artificial. También es cofundador de Aixware Technologies, microempresa orientada a proveer soluciones industriales con sistemas embebidos inteligentes.
Equipo de investigadores
- Dra. Adriana Vargas Martínez
- Dr. Luis Ismael Minchala Avila
- Dr. José Israel Martínez López
- MsC. Cristina Tehaní Aparicio García (estudiante DCI)
- MsC. Edisson Andrés Naula Duchi (estudiante DNT)
- MsC. Juan Antonio Algarín Pinto (estudiante DCI)
- MsC. Salvador Alejandro Leal Merlo (estudiante DCI)
Artículos relacionados
- Dynamic Modeling and Control of a Parallel Mechanism Used in the Propulsion System of a Biomimetic Underwater Vehicle. Juan Antonio Algarín-Pinto, Luis E. Garza-Castañón, Adriana Vargas-Martínez, Luis I. Minchala-Ávila. Applied Sciences 2021, 11, 4909. Special issue Robots Dynamics: Application and Control.
DOI: https://doi.org/10.3390/app11114909 - Design, Construction, and Modeling of a BAUV with Propulsion System based on a Parallel Mechanism for the Caudal Fin. Tehani Aparicio-García, Naula Duchi Edisson A., Luis E. Garza-Castañón, Adriana Vargas-Martínez, J. Israel Martínez-López, Luis I. Minchala-Avila. Applied Sciences. 2020, 10, 2426. Special Issue in Bio-Inspired Robotics II.
DOI: https://doi.org/10.3390/app10072426